IEEE Transactions on Robotics (T-RO)
@IeeeTro
Reporting major advances in the state-of-the-art in all areas of robotics.
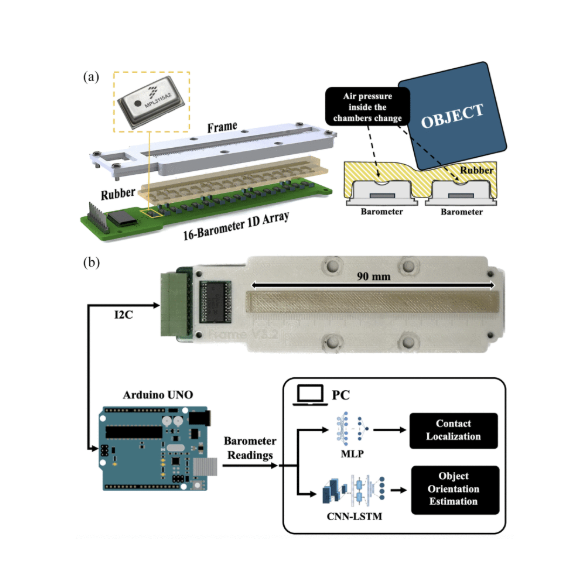
Researchers from @imperialcollege present an affordable ($80) barometric #tactilesensor, achieving 0.28mm resolution through machine learning enhancement. Mounted on a robotic gripper, it enables precise object pose estimation. ieeexplore.ieee.org/document/10770… #RoboticGrasping #Sensors
For more on the latest state of the art in robotics, check out IEEE T-RO on BlueSky, at ieeetro.bsky.social bsky.app/profile/ieeetr…

A new T-RO paper presents an adaptive approach for combining robot precision with human guidance in geometrically-constrained scenarios, featuring online adaptation capabilities. ieeexplore.ieee.org/document/10814… #HapticGuidance #HumanRobotCollaboration

Sadly, T-RO has recently lost a founding father with the passing of George Bekey, renowned American roboticist, an original member of @ieeeras, and founding editor-in-chief of @IeeeTro ieeexplore.ieee.org/document/10896…
Are you an author of a T-RO paper that is presenting their work at @ieee_ras_icra paper? Please make sure to register today before the author registration deadline! 2025.ieee-icra.org #ICRA2025 #robotics #ICRAAtlanta

DREAM, a real-time multi-robot navigation framework handling cluttered environments with uncertain communication and obstacle dynamics. The system explicitly accounts for interactive obstacles while maintaining robust performance. ieeexplore.ieee.org/document/10771… #MultiRobot #Navigation
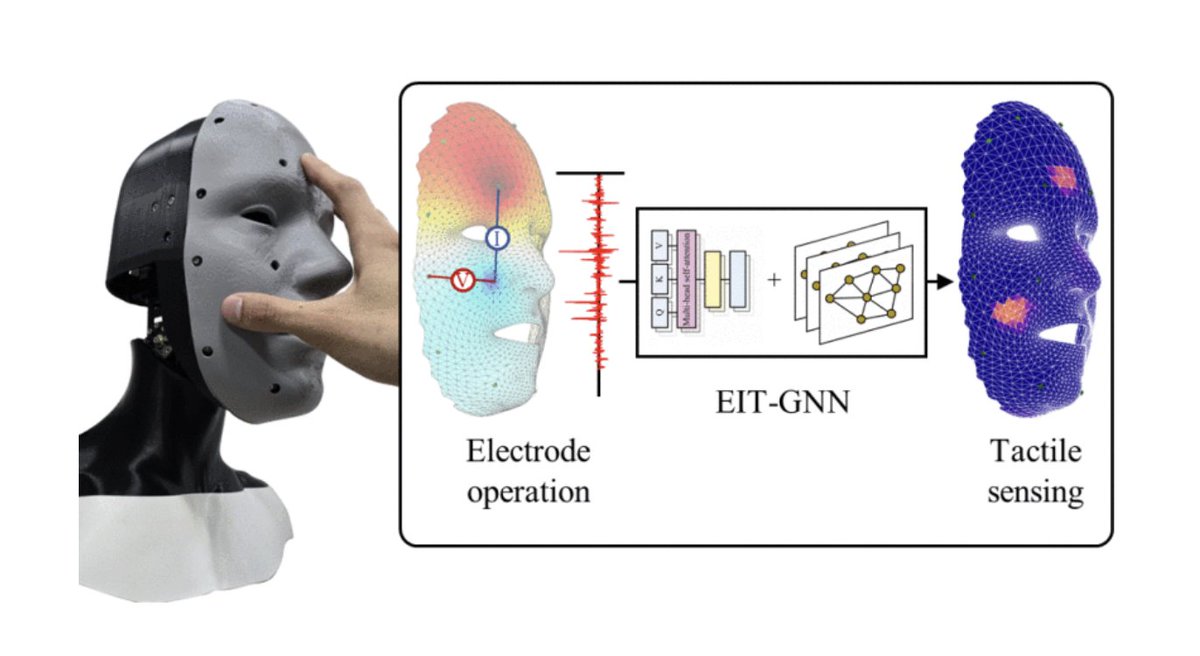
Researchers at @KAIST_me introduce a graph-structured super-resolution framework for large-area tomographic #tactilesensing. On a #humanoid face, the system enables natural human-robot interaction while adapting to various sensor shapes. #HRI ieeexplore.ieee.org/document/10770…
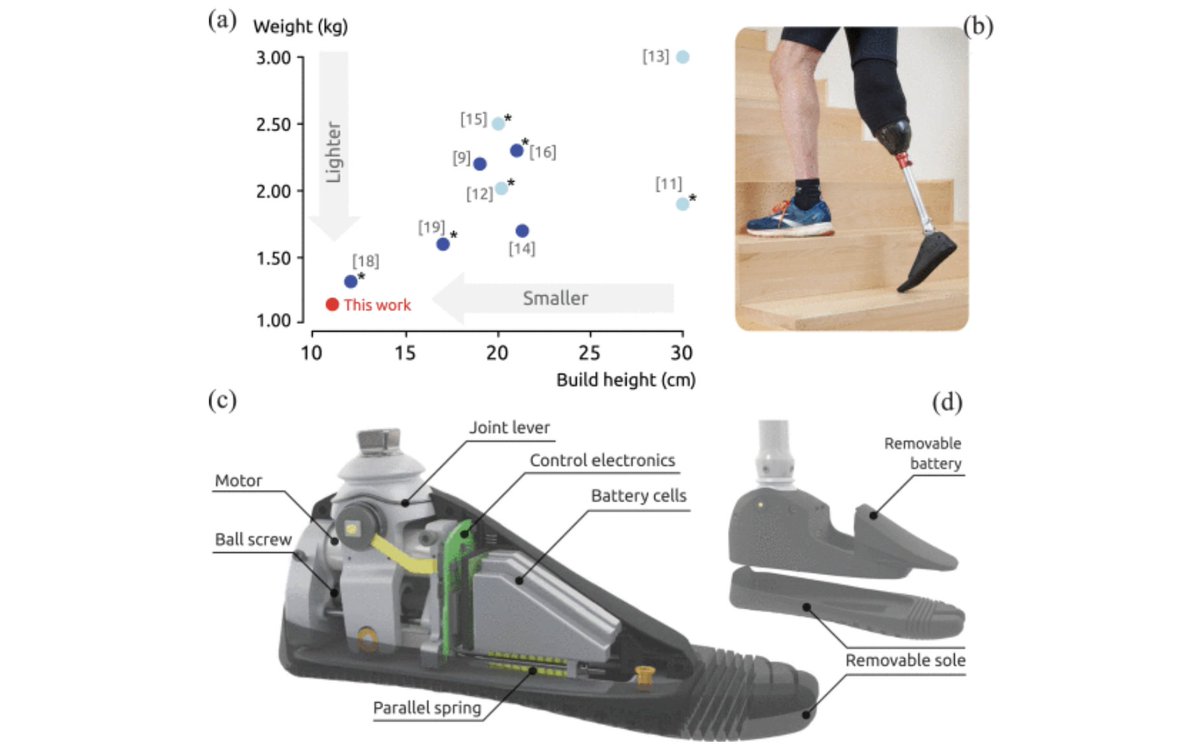
A lightweight active ankle #prosthesis with graceful degradation capabilities, validated through extensive trials with trans-tibial and trans-femoral amputees, achieving reduced encumbrance while maintaining safety through passive fallback. #Biomechanics ieeexplore.ieee.org/document/10770…
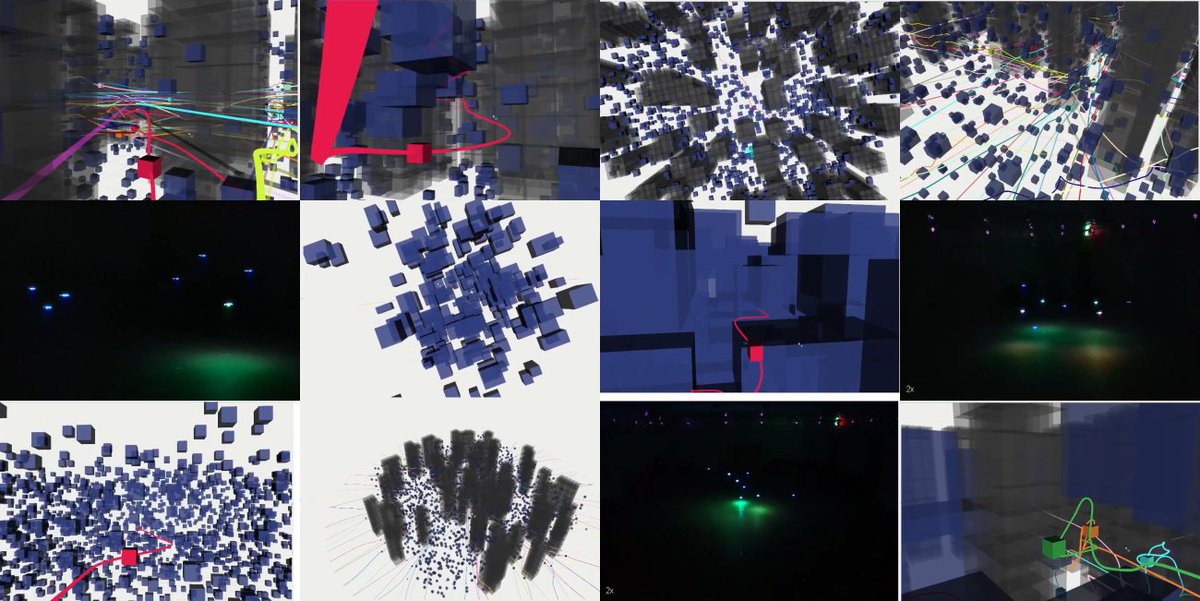
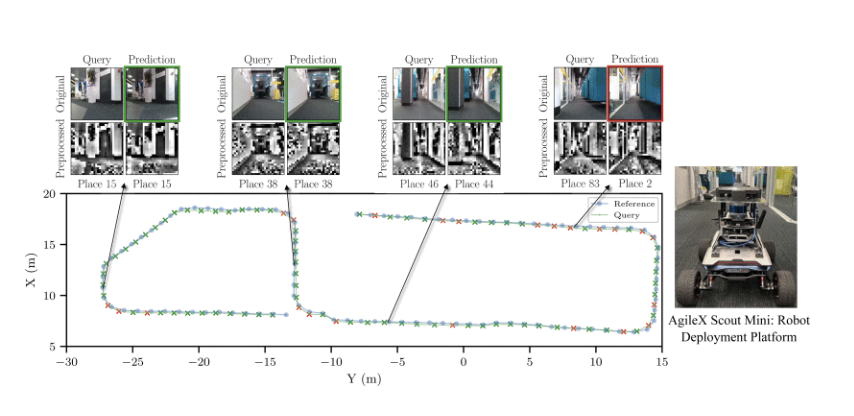
Researchers from @QUTRobotics present an energy-efficient place recognition system leveraging Spiking Neural Networks with modularity and sequence matching to rival traditional deep networks ieeexplore.ieee.org/document/10770… #PlaceRecognition #SpikingNeuralNetworks #RobotPerception
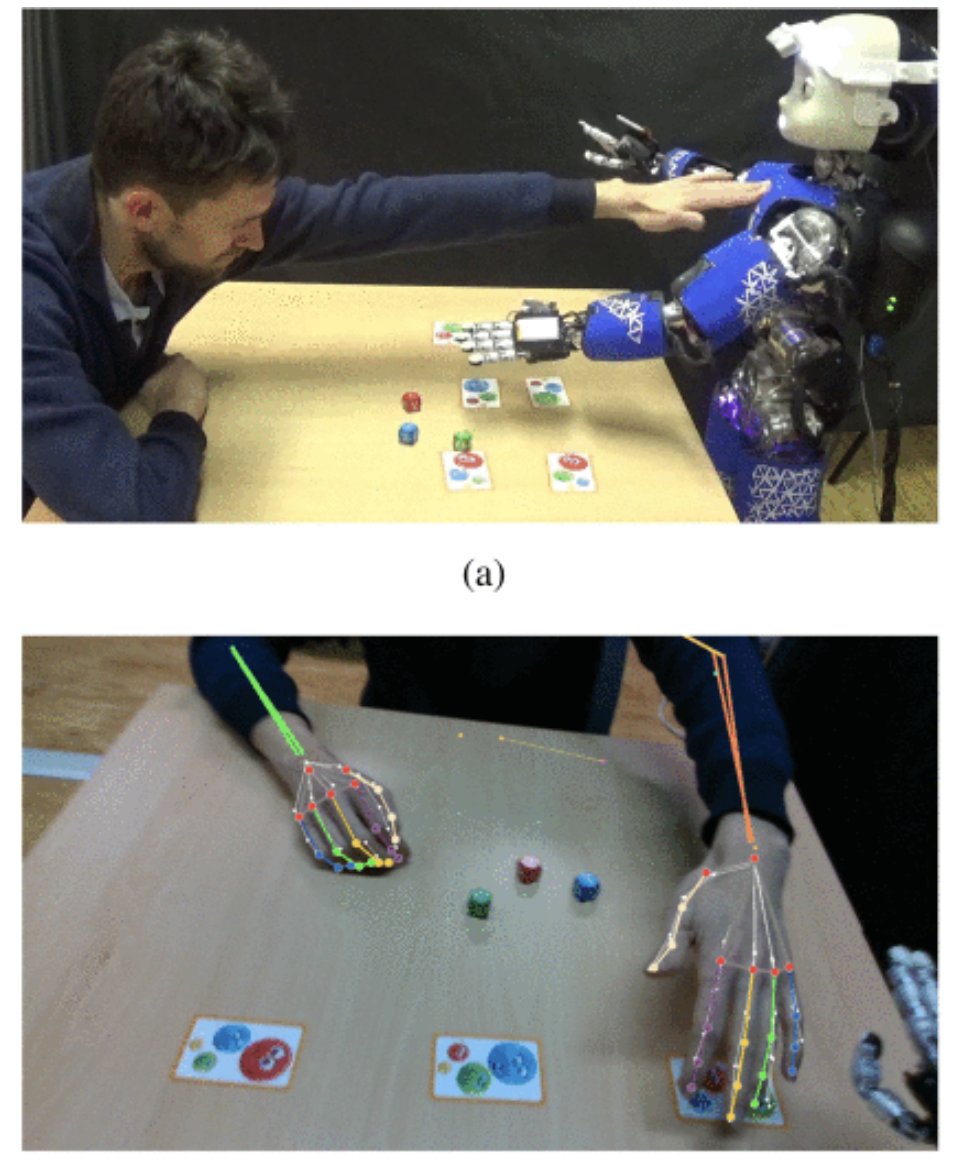
A new T-RO paper introduces HARMONIOUS, a real-time control system enabling humanoid robots to play board games while safely interacting with humans through multi-modal sensing (touch, proximity, vision). #HumanRobotInteraction #RoboticManipulation ieeexplore.ieee.org/document/10758…
A passive bilateral control framework for #RAMIS that handles communication delays while maintaining precise instrument control. The system ensures safety near sensitive structures using remote center of motion constraints ieeexplore.ieee.org/document/10758… #SurgicalRobotics

Researchers from @Stanford, @tudresden_de and @Meta have developed a method for miniaturizing vision-based #tactilesensors using fiber optic bundles. They show that the miniature design can provide clinically relevant data for cancer diagnosis ieeexplore.ieee.org/document/10746… #robotics

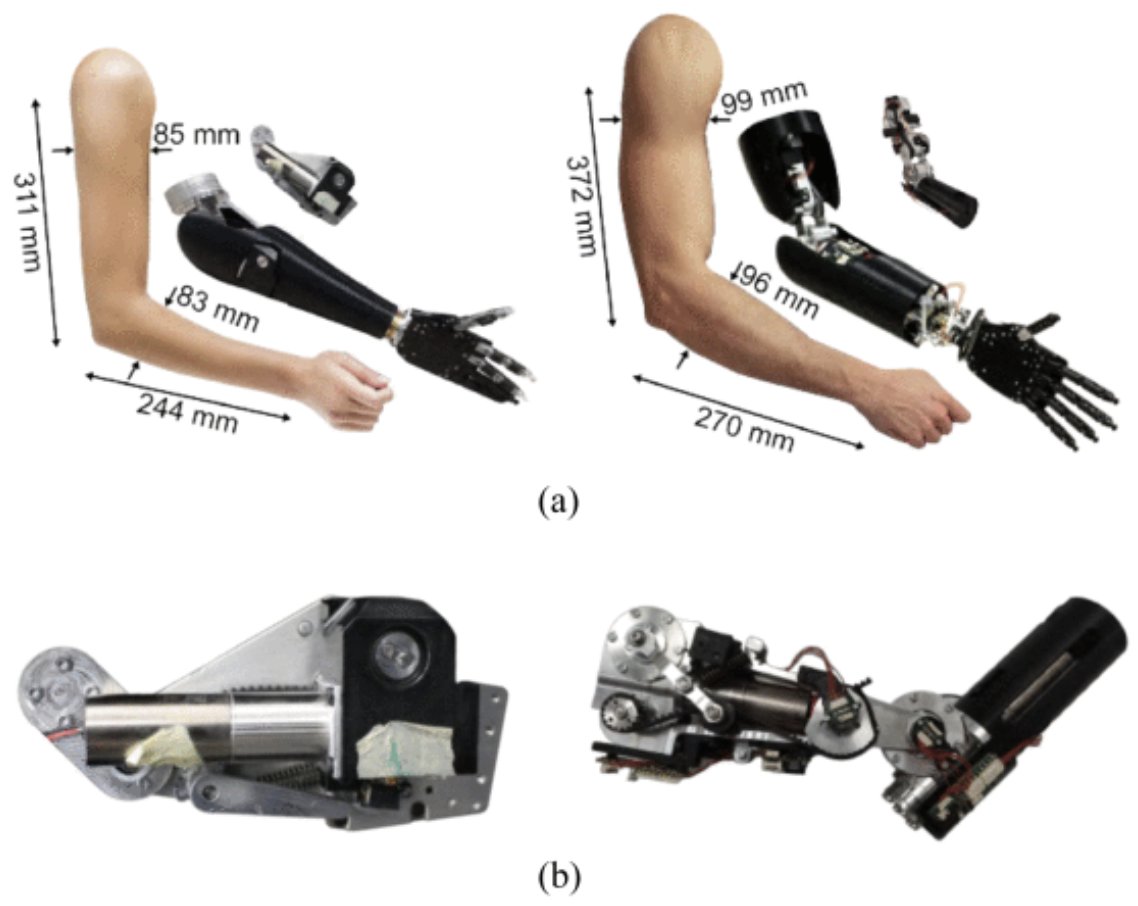
A recent T-RO paper presents a Variable Stiffness elbow #prosthesis that caters to diverse user needs and varying residual limb morphologies. ieeexplore.ieee.org/document/10746… #VariableStiffnessActuators #ElbowProsthetics #prosthetics #softrobotics @AntonioBicchi
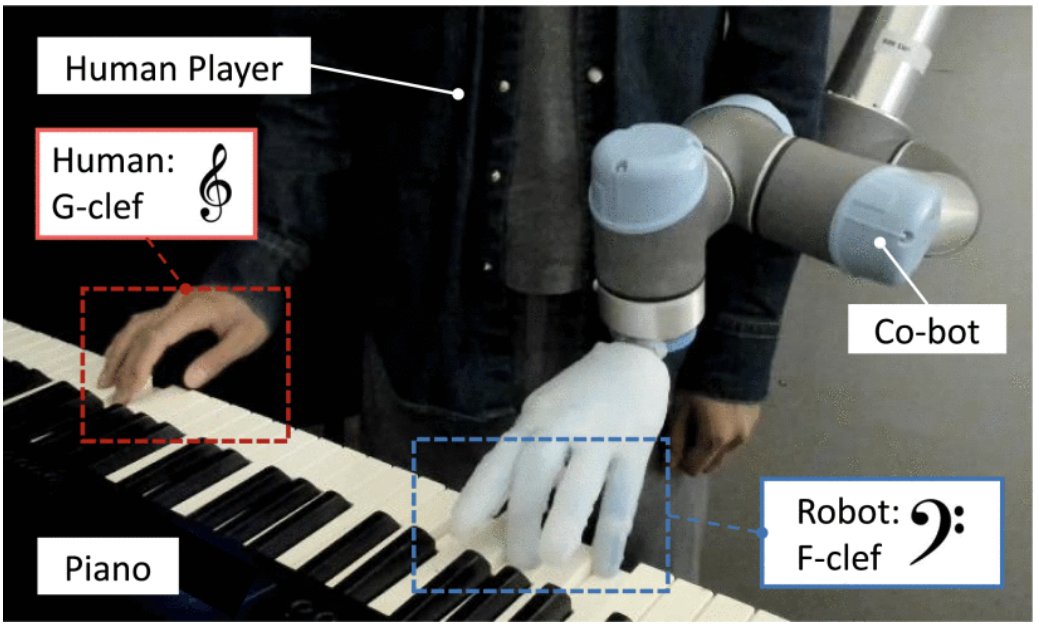
Researchers from @Cambridge_Uni develop a robot for human-robot piano collaboration, using real-time music accompaniment and non-verbal cues for seamless synchronization in a new T-RO paper 🎹🤖 ieeexplore.ieee.org/document/10726… #AI #HumanRobotInteraction #MusicRobotics #PianoPlayingRobot
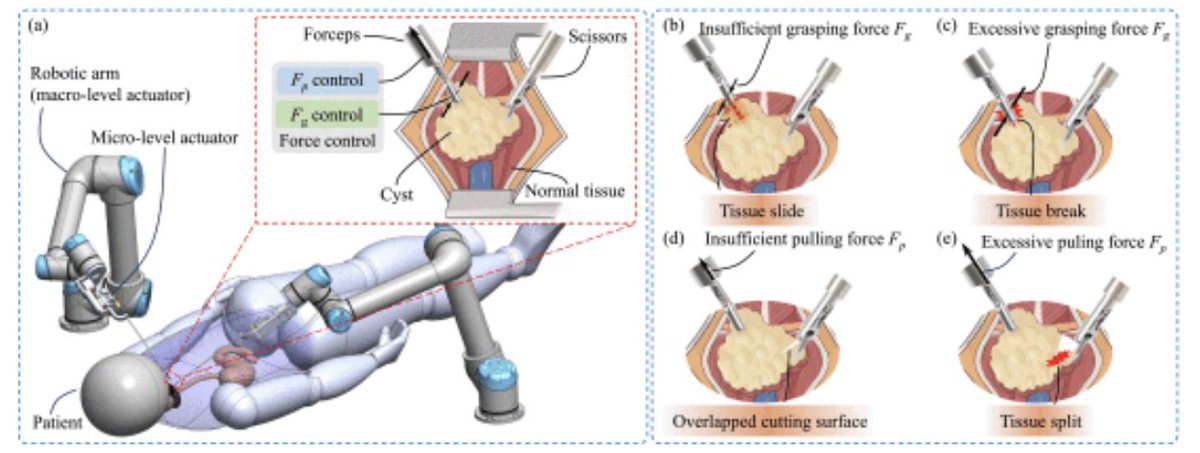
Utilizing innovative miniature sensorized forceps, a recent T-RO paper introduces a novel method to control multiple forces and automate tissue traction. ieeexplore.ieee.org/document/10734… #SurgicalRobots #AutomaticTissueTraction #RobotSensingSystems #MinimallyInvasiveSurgery @UNSW
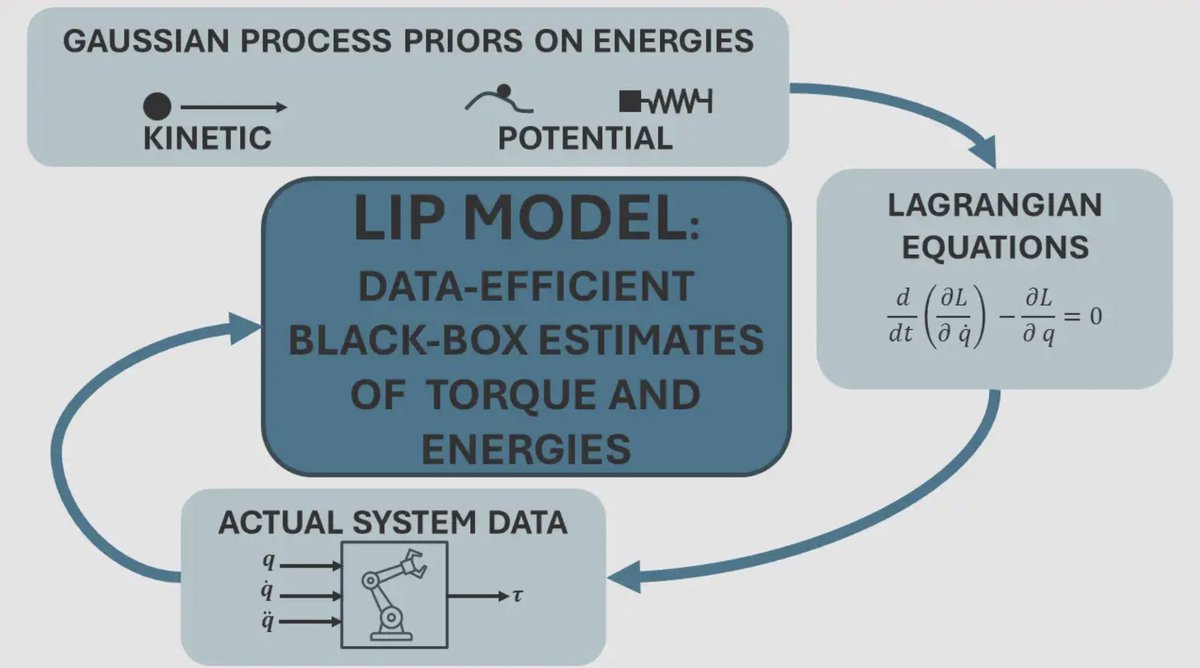
This T-RO paper uses a Lagrangian Inspired Polynomial kernel to perform #GaussianProcess (GP) regression for the identification of the #InverseDynamics of robotic manipulators. 🤖. ieeexplore.ieee.org/document/10705… #KineticEnergy #PotentialEnergy @RomeresDiego
(📢New #T_RO Paper ) Flexible monolithic body combined with vibrations could suggest embodied intelligence in locomotion robots. See our new paper on @IeeeTro on Terradynamics of Monolithic Soft Robot Driven by Vibration Mechanism ieeexplore.ieee.org/document/10852…
Researchers from @UofT perform extensive elastic #StabilityAnalysis of tendon driven continuum robots showing the existence of multiple robot configurations with different shapes, achievable with the same actuation inputs. ieeexplore.ieee.org/document/10286… #ContinuumRobots #Kinematics
T-RO is excited to announce the newest members to our editorial board, including: @ShoaibEhsan8, @KasraKhosoussi, Jongwoo Kim, @JiachenLi8, Xiang Li, Wei Pan, @MatteoSaveriano, Chaoyang Song, and Christos Verginis ieee-ras.org/publications/t…

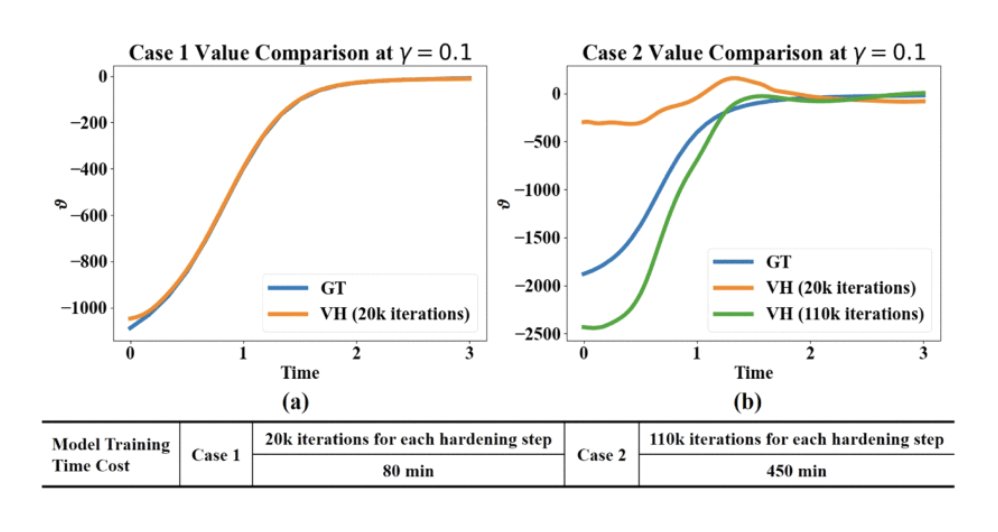
Researchers from @ASUEngineering develop a new algorithm for human robot interaction that relies upon efficiently solving complex partial differential equations using a novel hybrid learning approach. ieeexplore.ieee.org/document/10552… #NeuralNetworks #HumanRobotInteraction #robots